AF
AF
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 MS
MS
 GA
GA
 BN
BN

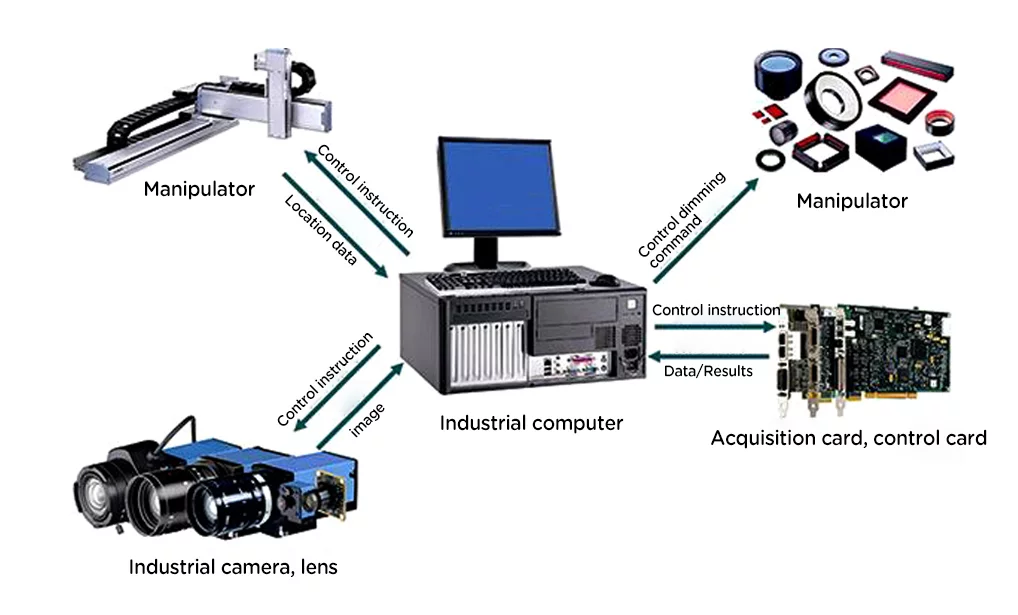
Masjienvisie
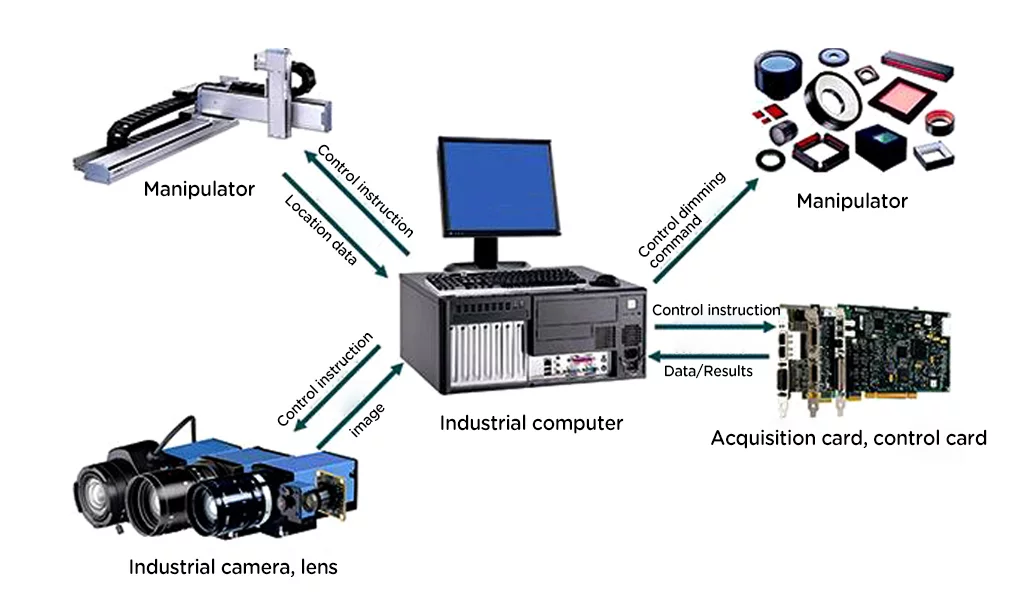
Masjienvisie is 'n omvattende tegnologie, insluitend beeldverwerking, meganiese ingenieurswese-tegnologie, beheer, elektriese liggbron-verligting, optiese beelddigting, sensors, analoog- en digitale video-tegnologie, rekenaarprogrammatuur- en hardeware-tegnologie (beeldverbetering- en analisealgoritmes, beeldkaarte, I/O-kaart, ens.). 'n Tipiese masjienvisie-toepassingsstelsel sluit in beeldopname, liggbron-stelsel, beelddigitaliseringsmoduul, digitale beeldverwerkingsmoduul, intelligente oordeelsbesluitnemingsmoduul en meganiese beheeruitvoeringsmoduul.
Werkingprinsip
Die masjienvision-inspeksiesisteem maak gebruik van 'n CCD-kamera om die opgespoorde doelwit in 'n beeldsignaal om te skakel, wat gestuur word na 'n gespesialiseerde beeldverwerkingsisteem, en volgens pikselverdeling, helderheid, kleur en ander inligting in 'n digitale signaal omgevoeg word, en die beeldverwerkingsisteem verrig verskeie berekeninge oor hierdie signale om die kenmerke van die doelwit te onttrek, soos area, kwantiteit, posisie, lengte, en dan die resultate uit te stuur volgens die voorprogrammeerde toleransie en ander toestande, insluitend grootte, hoek, nommer, goed/verwerp, teenwoordig/afwesig, ens., om die funksie van outomatiese herkenning te realiseer.
Toepassingsveld
Die toepassing van masjienvision sluit hoofsaaklik twee aspekte in: deteksie en robotvisie:
1. Opsporing: Dit kan in hoë-nogtegenniese kwantitatiewe opsporing (soos selklasifikasie van mikrografieë, grootte- en posisie meting van meganiese onderdele) en kwalitatiewe of semi-kwantitatiewe opsporing sonder meetinstrumente (soos produk uiterlike inspeksie, identifisering en posisionering van komponente op die monteerlyn, defektdeteksie en voltooiingsdeteksie van montering) verdeel word.
2. Robotvisie: Dit word gebruik om die bewerking en beweging van die robot oor 'n wyd bereik te begelei, soos om werfstukke uit 'n rommelige hoop van deur die hopper gestuurde werfstukke te selekteer en hulle in 'n sekere oriëntasie op die transportband of ander toerusting te plaas (dit is, die probleem van hopperseleksie). Vir bewerkings en bewegings oor 'n klein areaal word ook taktil sensortechnologie benodig.