BG
BG
 EN
EN AR
AR
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

Машинно зрение
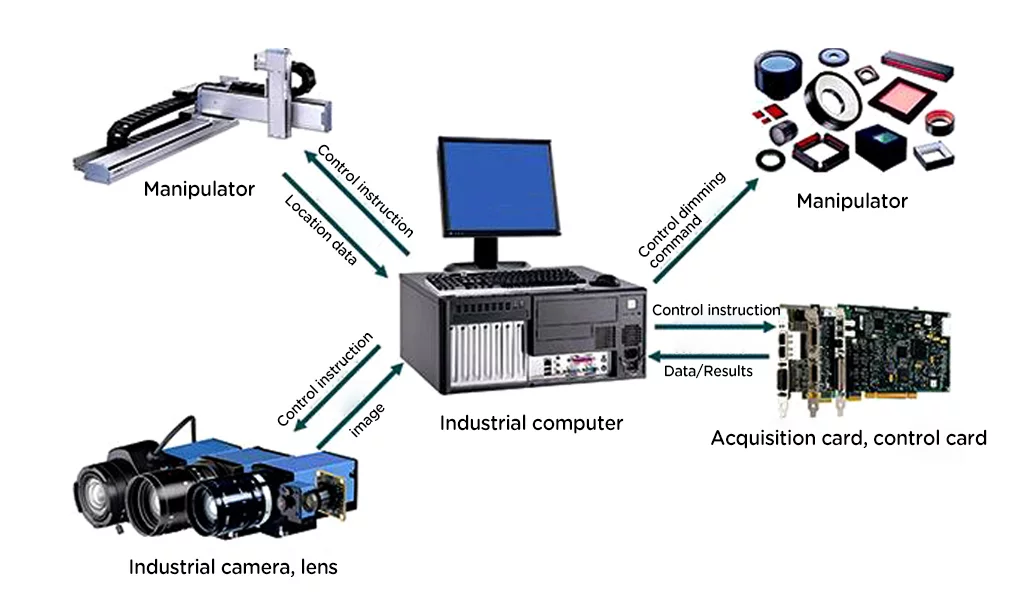
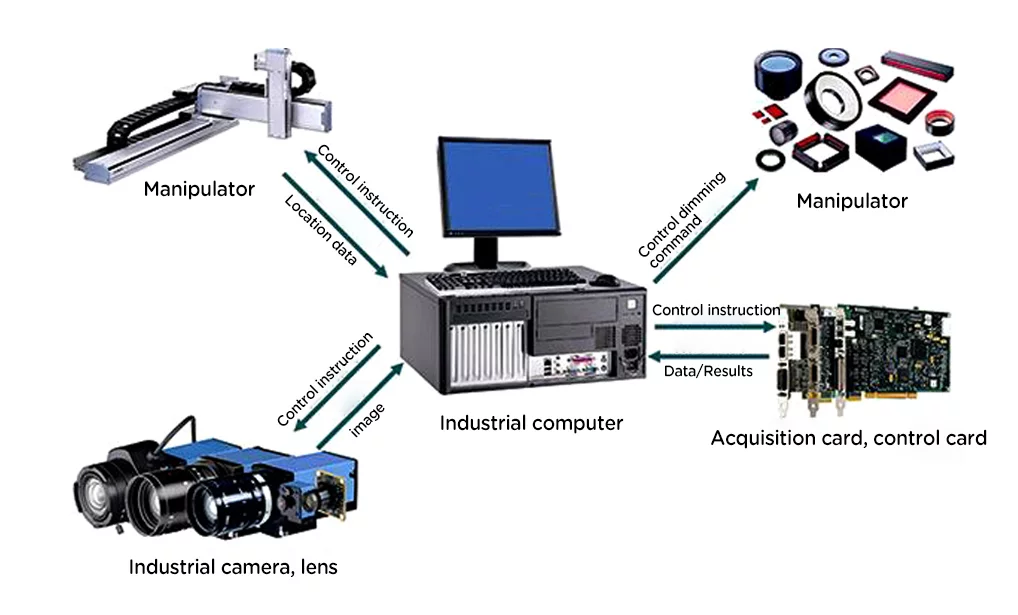
Машинната визия е всеобхватна технология, включваща обработка на изображения, механическа инженерна технология, управление, електрически световни източници и осветление, оптично изображаване, сензори, аналогови и цифрови видео технологии, компютърни софтуерни и хардуерни технологии (алгоритми за усилване и анализ на изображения, видеокарти, I/O карти и др.). Типична система за приложение на машинна визия включва улавяне на изображение, системата на световния източник, модул за цифровизация на изображения, модул за обработка на цифрови изображения, модул за интелигентно съдействие и вземане на решения и модул за механично контролиране и изпълнение.
Работен принцип
Системата за машинно зрение използва CCD камера, която преобразува открития обект в изображението на един сигнал, който се изпраща до специализирана система за обработка на изображения, и след това се преобразува в цифров сигнален сигнал според разпределението на пикселите, яркостта, цветовете и друга информация, а системата за обработка на изображения извършва различни изчисления на тези сигнали, за да извлече характеристиките на целевия обект, като площ, количество, позиция, дължина и след това изходните резултати се получават според предварително зададените допустими отклонения и други условия, включително размер, ъгъл, число, пригодност/непригодност, наличие/отсъствие и т.н., за да се реализира функцията за автоматично разпознаване.
Област на приложение
Приложението на машинното зрение включва предимно две аспекти: детекция и роботно зрение:
1. Детекция: Тя може да се раздели на високопrecизна количествена детекция (например, класификация на клетки в микроснимки, измерване на размера и позицията на механически части) и кvalитативна или полу-количествена детекция без измерителни инструменти (например, проверка на външния вид на продуктите, идентификация и позициониране на компоненти на производствената линия, детекция на дефекти и проверка на пълното монтажно устройство).
2. Роботичко зрение: Използва се за насочване на операциите и действията на робота в голям мащаб, като например извличане на детали от неорганизирана купчина, предадена от хопъра, и поставяне им на транспортен лент или друго оборудване в определена ориентация (т.е., проблемът с хопърното избиране). За операции и действия в малка област също се изисква технологията на тактилното усещане.