BN
BN
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA

মেশিন ভিশন
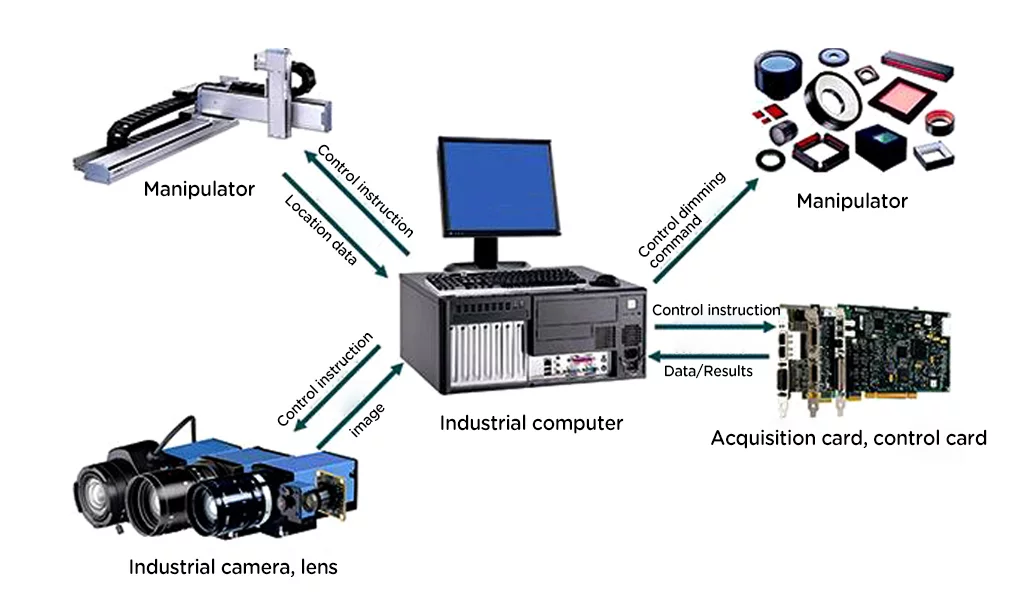
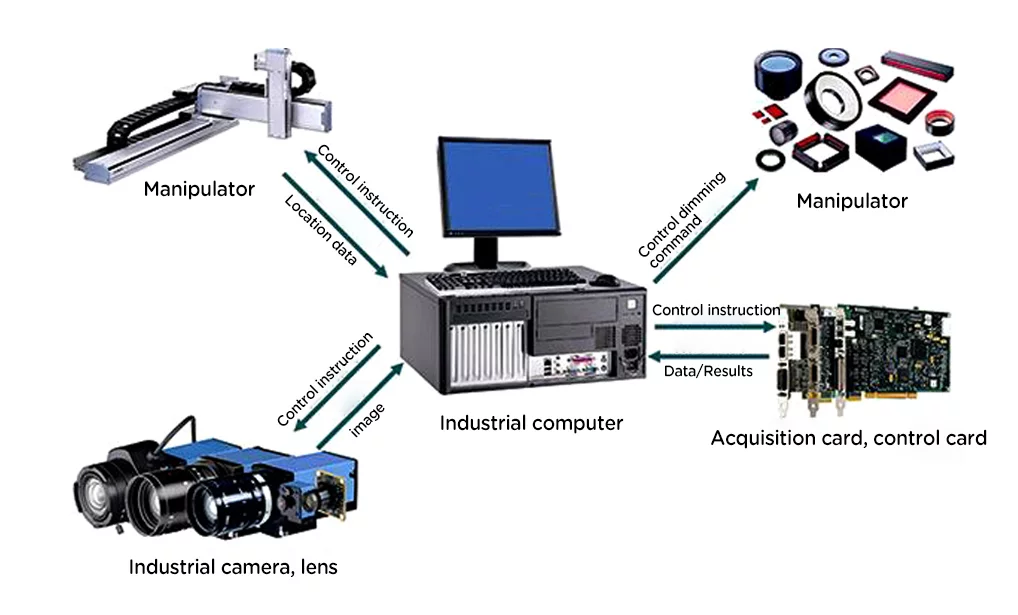
মেশিন ভিশন একটি সম্পূর্ণ প্রযুক্তি, যা ছবি প্রক্রিয়াকরণ, যান্ত্রিক প্রকৌশল প্রযুক্তি, নিয়ন্ত্রণ, বৈদ্যুতিক আলোক আলোকিত, অপটিক্যাল চিত্রণ, সেন্সর, অনুরূপ ও ডিজিটাল ভিডিও প্রযুক্তি, কম্পিউটার সফটওয়্যার ও হার্ডওয়্যার প্রযুক্তি (ছবি বৃদ্ধি ও বিশ্লেষণ অ্যালগরিদম, ছবি কার্ড, I/O কার্ড ইত্যাদি) অন্তর্ভুক্ত। একটি টাইপিক্যাল মেশিন ভিশন অ্যাপ্লিকেশন সিস্টেম ছবি গ্রহণ, আলোক সিস্টেম, ছবি ডিজিটালাইজেশন মডিউল, ডিজিটাল ছবি প্রক্রিয়াকরণ মডিউল, বুদ্ধিমান বিচার ও সিদ্ধান্ত গ্রহণ মডিউল এবং যান্ত্রিক নিয়ন্ত্রণ বাস্তবায়ন মডিউল অন্তর্ভুক্ত।
কাজ করার নীতি
মেশিন ভিশন ইনস্পেকশন সিস্টেমটি একটি CCD ক্যামেরা ব্যবহার করে ডিটেক্টেড লক্ষ্যকে ইমেজ সংকেতে রূপান্তর করে, যা একটি নির্দিষ্ট ইমেজ প্রসেসিং সিস্টেমে পাঠানো হয়, এবং পিক্সেল বিতরণ, উজ্জ্বলতা, রঙ এবং অন্যান্য তথ্যের উপর ভিত্তি করে একটি ডিজিটাল সংকেতে রূপান্তরিত হয়, এবং ইমেজ প্রসেসিং সিস্টেম এই সংকেতগুলিতে বিভিন্ন গণনা করে লক্ষ্যের বৈশিষ্ট্য বের করতে, যেমন এলাকা, পরিমাণ, অবস্থান, দৈর্ঘ্য এবং তারপর প্রস্তুতকৃত সহনশীলতা এবং অন্যান্য শর্তাবলীর উপর ভিত্তি করে ফলাফল আউটপুট করে, যা আকার, কোণ, সংখ্যা, পাস/ফেল, উপস্থিতি/অনুপস্থিতি ইত্যাদি অন্তর্ভুক্ত করে এবং স্বয়ংক্রিয় চিহ্নিতকরণের কাজ সম্পাদন করে।
প্রয়োগ ক্ষেত্র
মেশিন ভিশনের প্রয়োগ মূলত দুটি দিকে অন্তর্ভুক্ত: পরীক্ষা এবং রোবট ভিশন:
১. ডিটেকশন: এটি উচ্চ-সংখ্যাগত পরিমাপযোগ্য ডিটেকশন (যেমন মাইক্রোগ্রাফের কোষ শ্রেণিবদ্ধকরণ, যান্ত্রিক অংশের আকার এবং অবস্থান পরিমাপ) এবং পরিমাপের যন্ত্র ছাড়াই গুণমূলক বা অর্ধ-সংখ্যাগত ডিটেকশন (যেমন পণ্যের বাহিরের জাঁচ, সামুহিক লাইনে শূন্য ঘটক চিহ্নিতকরণ এবং অবস্থাননির্দেশ, দোষ ডিটেকশন এবং আসেম্বলি সম্পূর্ণতা ডিটেকশন) ভাগে বিভক্ত করা যেতে পারে।
২. রোবট ভিশন: এটি বড় পরিসরে রোবটের কাজ এবং কাজের দিকনির্দেশনা দেওয়ার জন্য ব্যবহৃত হয়, যেমন হপার দ্বারা পাঠানো বিষম স্তূপের কাজের টুকরো নিয়ে এসে তা নির্দিষ্ট দিকে কনভেয়ার বেল্টে বা অন্যান্য যন্ত্রে রাখা (অর্থাৎ, হপার পিকিং সমস্যা)। ছোট এলাকায় কাজ এবং কাজের জন্য টাচ সেন্সিং প্রযুক্তিরও প্রয়োজন হতে পারে।