ES
ES
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

Visión Artificial
La visión artificial es una tecnología integral, que incluye el procesamiento de imágenes, la tecnología de ingeniería mecánica, el control, la iluminación de fuentes de luz eléctricas, la imagen óptica, los sensores, la tecnología de vídeo analógica y digital, el software y la tecnología de hardware (algoritmos de mejora y análisis
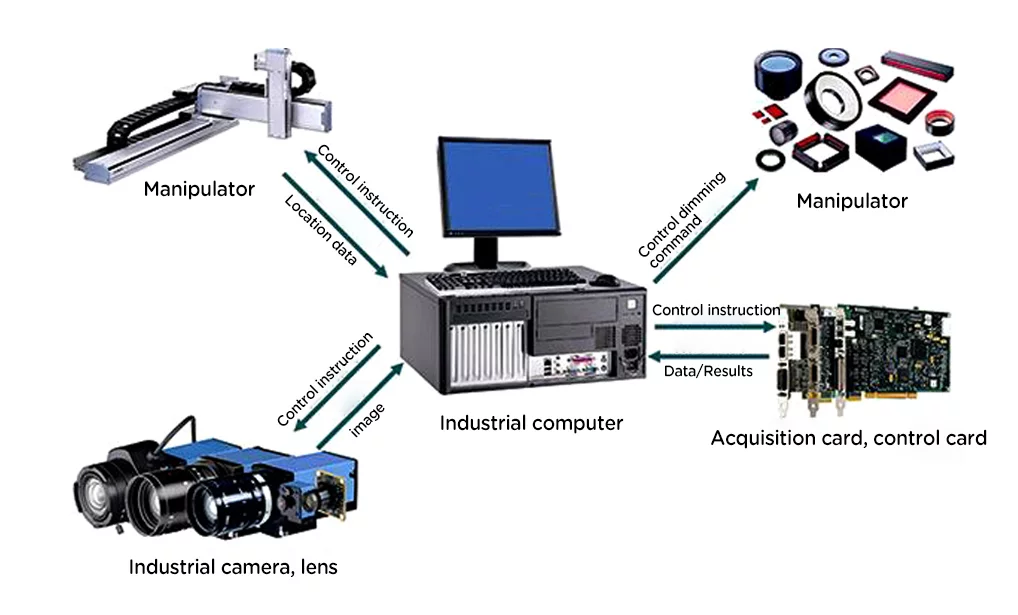
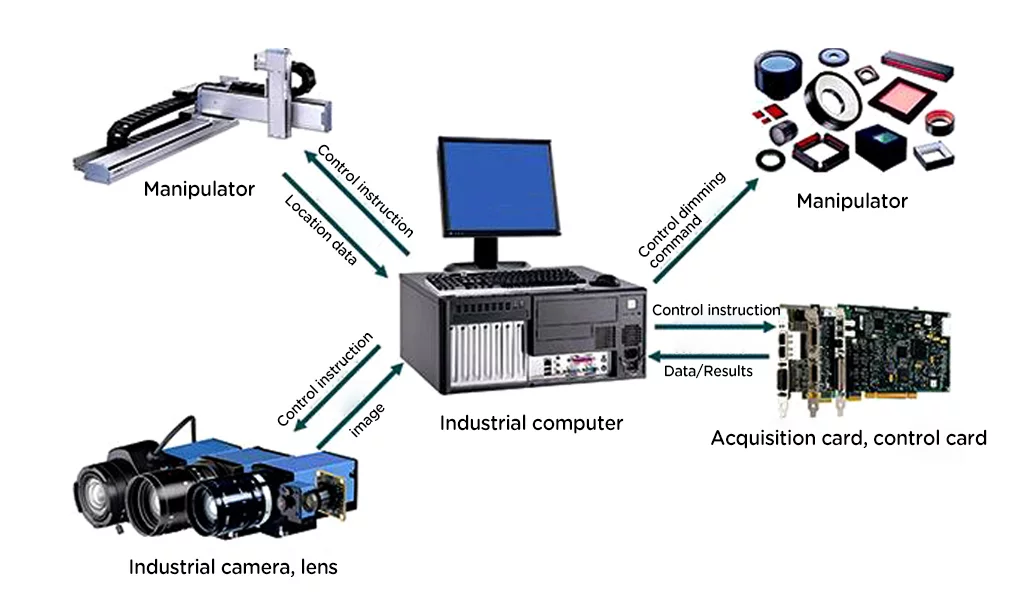
Principio de funcionamiento
el sistema de inspección de visión artificial utiliza una cámara ccd para convertir el objetivo detectado en una señal de imagen, que se envía a un sistema de procesamiento de imágenes dedicado y se convierte en una señal digital de acuerdo con la distribución de píxeles, brillo, color y otra información, y el sistema de procesamiento de imágenes realiza varios
Campo de aplicación
La aplicación de la visión artificial incluye principalmente dos aspectos: detección y visión por robot:
1. detección: puede dividirse en detección cuantitativa de alta precisión (como la clasificación celular de las micrografías, la medición del tamaño y la posición de las piezas mecánicas) y detección cualitativa o semi-cuantitativa sin instrumentos de medición (como la inspección de la apariencia del producto, la identificación y
2. visión del robot: se utiliza para guiar el funcionamiento y la acción del robot en un amplio rango, como recoger piezas de trabajo de la pila desordenada de piezas de trabajo enviadas por la tolva y colocarlas en la cinta transportadora u otro equipo en una determinada orientación (es decir, el problema de la recogida de tolva