FI
FI
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

koneenäkö
Konenäkyvy on kattava teknologia, johon kuuluvat kuvaa käsittelevä, koneinrakennusteknologia, ohjaus, sähköinen valonlähteen valaistus, optinen kuvantaminen, anturit, analoginen ja digitaalinen videoteknologia, tietokoneohjelmisto- ja laitteistoteknologia (kuvan parantaminen ja analysointialgorit
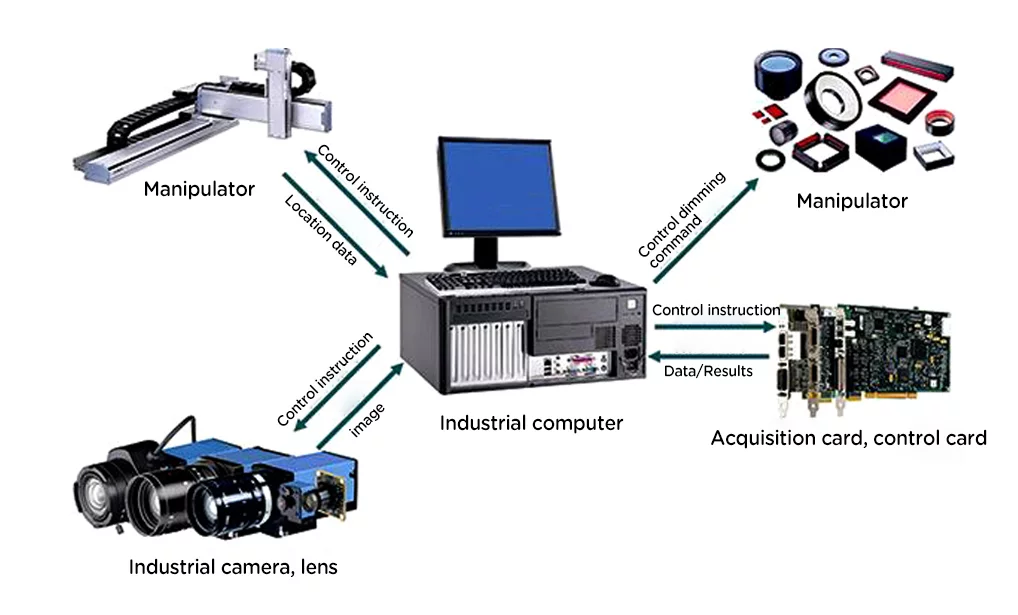
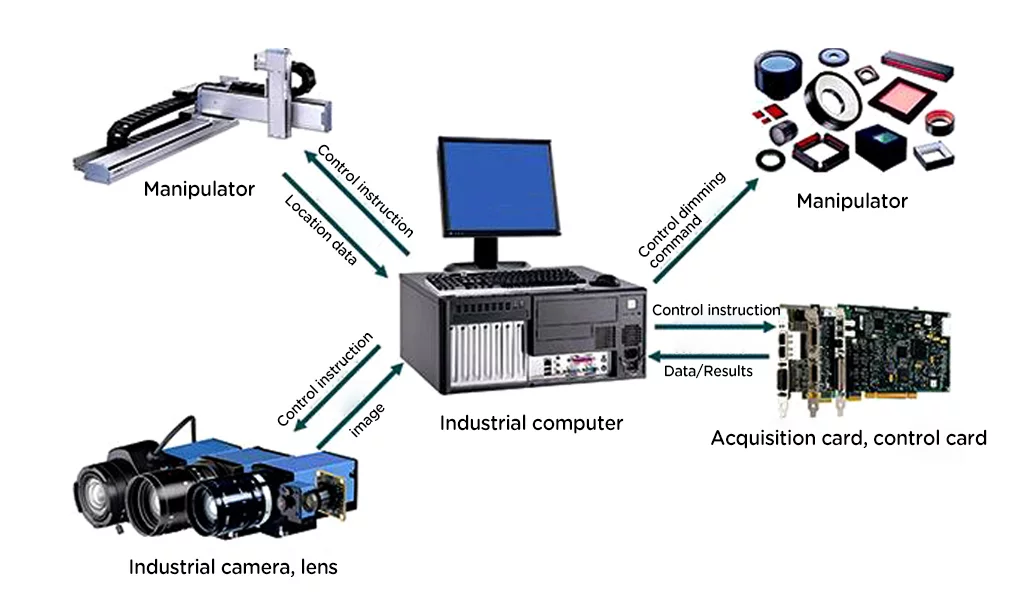
Toimiprinssiini
koneenäkötarkastusjärjestelmä muuntaa havaitun kohteen kuvasiinaliksi, joka lähetetään erikoistuneeseen kuvantekäsittelyjärjestelmään ja muunnetetaan digitaaliseksi signaaliksi pikseleiden jakautumisen, kirkkauden, värin ja muiden tietojen mukaan, ja kuvantekäsittelyjärjestelmä suorittaa näillä signaaleilla erilaisia lask
Sovellusalue
Koneiden näkemisen soveltamiseen liittyy pääasiassa kaksi näkökulmaa: havaitseminen ja robottien näkeminen:
1. havaitseminen: se voidaan jakaa korkean tarkkuuden määrälliseen havaitsemiseen (kuten mikroskuvien solujen luokittelu, mekaanisten osien koon ja sijainnin mittaaminen) ja laadulliseen tai puolikvantitatiiviseen havaitsemiseen ilman mittausvälineitä (kuten tuotteen ulkonäkötarkast
2. robottinäkö: sitä käytetään ohjaamaan robotin toimintaa ja toimintaa suurella alueella, kuten hakemaan työosat hopperin lähettämästä sotkuisesta työosapäästä ja sijoittamaan ne kuljetusnauhaan tai muuhun laitteeseen tiettyyn suuntaukseen (eli hopperin hakemisongelma).