FR
FR
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

Vision machine
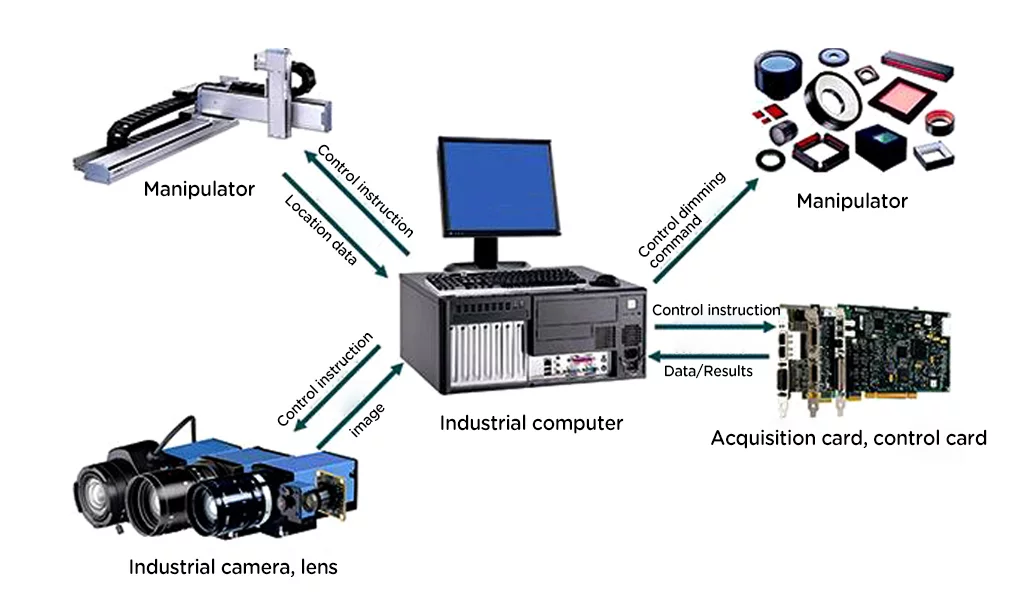
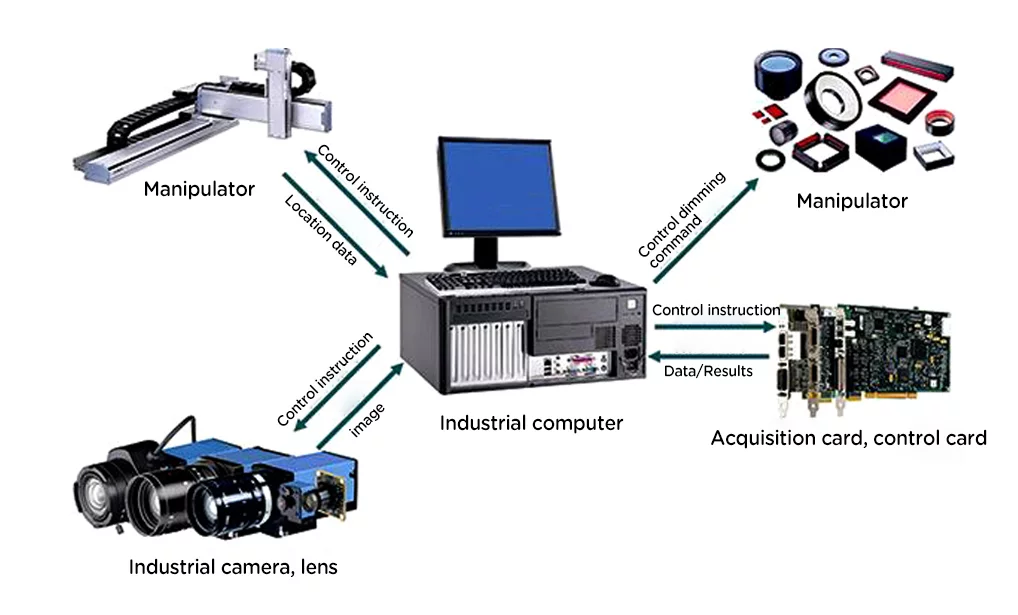
La vision par ordinateur est une technologie complète, incluant le traitement d'images, la technologie d'ingénierie mécanique, le contrôle, l'éclairage par source lumineuse électrique, l'imagerie optique, les capteurs, la technologie vidéo analogique et numérique, ainsi que la technologie logicielle et matérielle informatique (algorithmes d'amélioration et d'analyse d'images, cartes graphiques, carte I/O, etc.). Un système typique d'application de vision par ordinateur comprend la capture d'images, le système d'éclairage, le module de numérisation d'images, le module de traitement d'images numériques, le module de jugement intelligent et de prise de décision, ainsi que le module d'exécution du contrôle mécanique.
Principe de fonctionnement
Le système d'inspection par vision machine utilise une caméra CCD pour convertir l'objectif détecté en signal image, qui est ensuite envoyé à un système de traitement d'images dédié, et converti en signal numérique en fonction de la distribution des pixels, de la luminosité, de la couleur et d'autres informations, et le système de traitement d'images effectue divers calculs sur ces signaux pour extraire les caractéristiques de l'objectif, comme la surface, la quantité, la position, la longueur, puis transmet les résultats conformément aux tolérances préétablies et autres conditions, y compris la taille, l'angle, le nombre, pass/fail, présence/absence, etc., afin de réaliser la fonction de reconnaissance automatique.
Domaine d'application
L'application de la vision machine inclut principalement deux aspects : le contrôle qualité et la vision robotisée :
1. Détection : Elle peut être divisée en détection quantitative haute précision (comme la classification cellulaire des micrographies, la mesure de la taille et de la position des pièces mécaniques) et en détection qualitative ou semi-quantitative sans instruments de mesure (comme l'inspection de l'apparence du produit, l'identification et la localisation des composants sur une chaîne d'assemblage, la détection de défauts et la vérification de la complétude de l'assemblage).
2. Vision robotique : Elle est utilisée pour guider les opérations et actions du robot dans une grande envergure, comme le prélèvement de pièces depuis un tas désordonné de pièces envoyé par un distributeur et leur placement sur une bande transporteuse ou un autre équipement dans une certaine orientation (c'est-à-dire, le problème du prélèvement au distributeur). Pour les opérations et actions dans une petite zone, la technologie de capteurs tactiles est également nécessaire.