IT
IT
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

Visione delle Macchine
la visione artificiale è una tecnologia completa, che comprende l'elaborazione delle immagini, la tecnologia di ingegneria meccanica, il controllo, l'illuminazione elettrica da sorgente luminosa, l'imaging ottico, i sensori, la tecnologia video analogica e digitale, il software e la tecnologia hardware (algorit
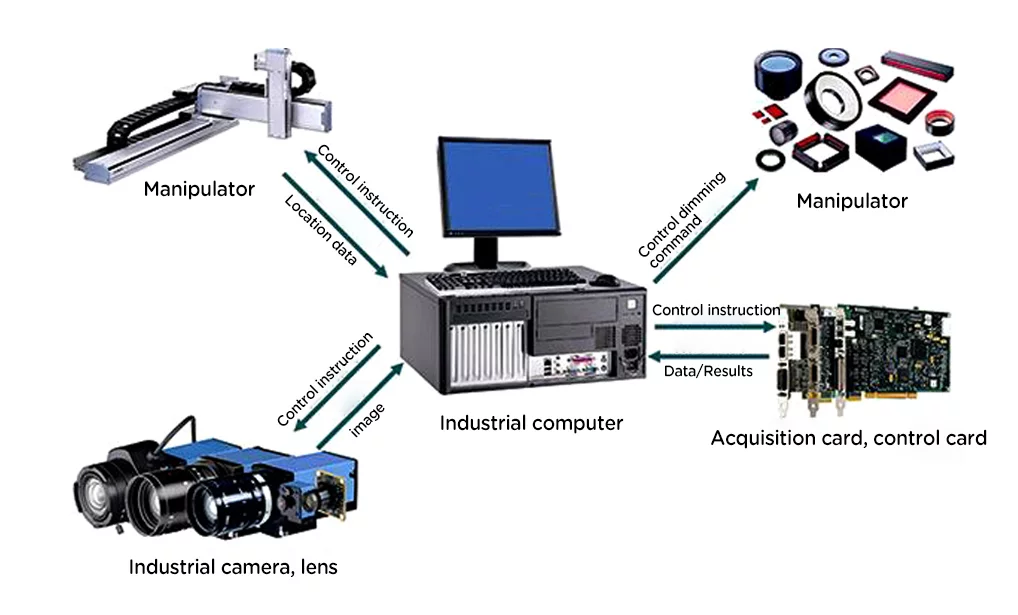
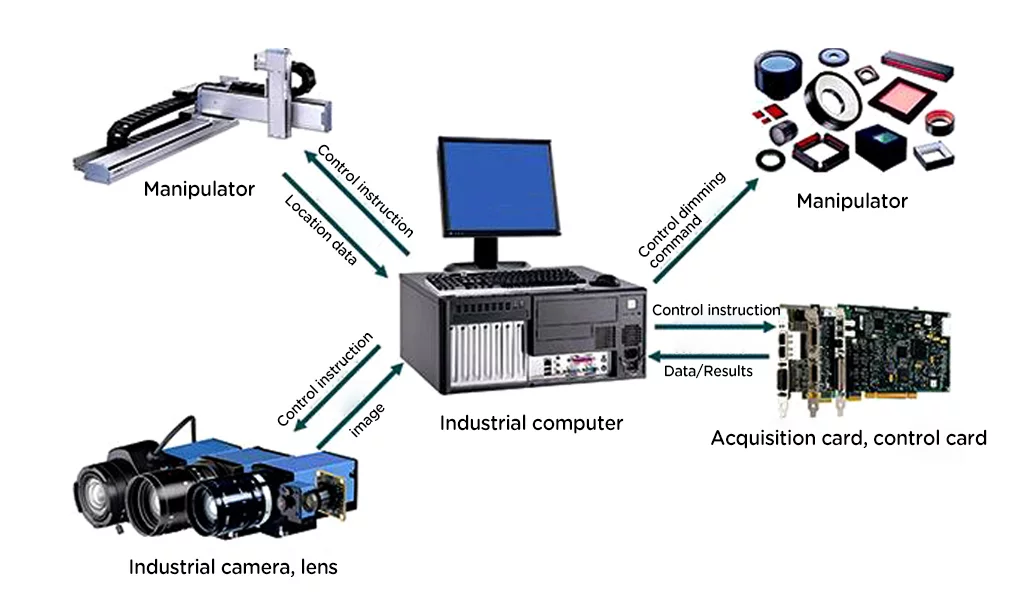
Principio di funzionamento
il sistema di ispezione della visione artificiale utilizza una telecamera ccd per convertire il bersaglio rilevato in un segnale d'immagine, che viene inviato a un sistema di elaborazione d'immagine dedicato e convertito in un segnale digitale in base alla distribuzione dei pixel, alla luminos
Campo di applicazione
l'applicazione della visione artificiale comprende principalmente due aspetti: rilevamento e visione robotica:
1. rilevamento: può essere suddiviso in rilevamento quantitativo di alta precisione (come la classificazione delle cellule delle micrografie, la misurazione delle dimensioni e della posizione delle parti meccaniche) e rilevamento qualitativo o semicontinuativo senza strumenti di misurazione (come l'ispezione dell'aspetto
2. visione del robot: viene utilizzata per guidare il funzionamento e l'azione del robot in una vasta gamma, come ad esempio raccogliere pezzi da lavorare dal mucchio di pezzi di lavoro inviati dalla tramoggia e posizionarli sul nastro trasportatore o su altre attrezzature in un determinato orientamento (cioè il problema del picking