NO
NO
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

Maskinvizjon
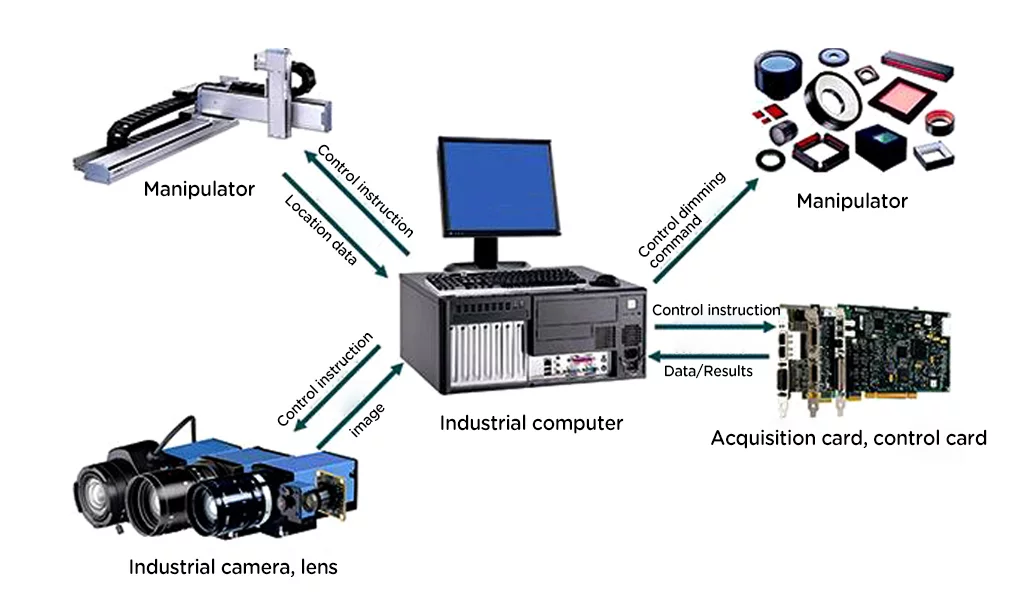
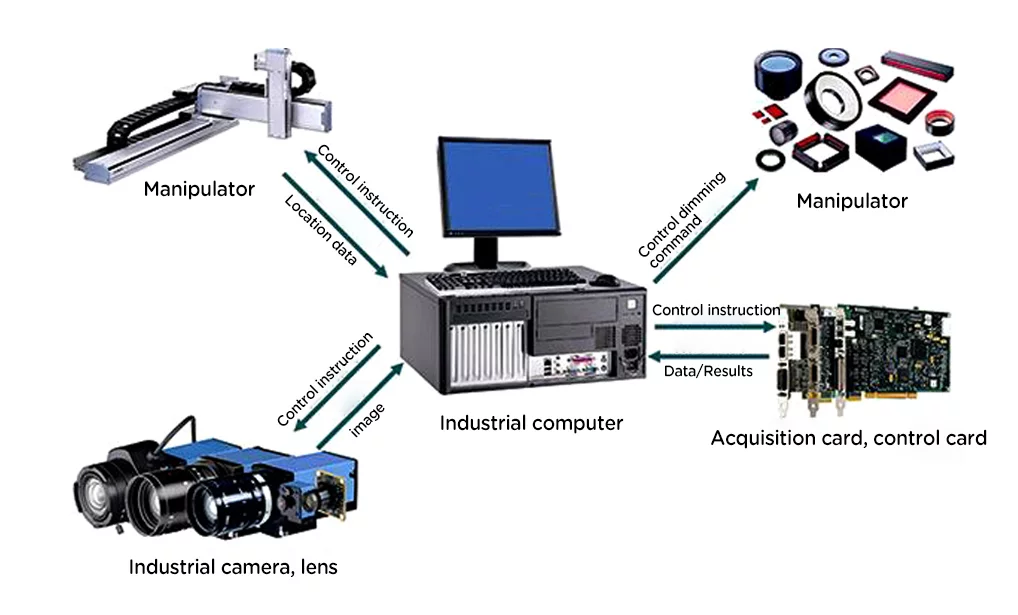
Maskinvision er en omfattende teknologi som inkluderer bildebehandling, mekanisk ingeniørsteknologi, kontroll, elektrisk lyskildebelysning, optisk avbildning, sensorer, analog og digital videoteknologi, datamaskinteknologi for programvare og -håndtering (bildeforbedring og analysealgoritmer, bildekort, I/O-kort osv.). Et typisk maskinvisionssystem inkluderer bildekaptureringsmodul, lyskildesystem, bilde digitaliseringsmodul, digital bildebehandlingsmodul, intelligent avgjørelsesmodul og mekanisk kontroll- og utførelsesmodul.
Arbeidsprinsippet
Systemet for maskinvisionstesting bruker en CCD-kamera for å konvertere det oppdagede målet til et bilde-signal, som sendes til et dedikert bildebehandlingsystem, og konverteres til et digitalt signal basert på pikseldistribusjon, lysstyrke, farge og annen informasjon. Bildebehandlingsystemet utfører ulike beregninger på disse signalene for å trekke ut karakteristikker ved målet, som areal, mengde, posisjon, lengde, og deretter sender resultatene ut etter den forhåndsvurderte toleransen og andre betingelser, inkludert størrelse, vinkel, antall, godkjent/avvist, til stede/fraværende, osv., for å realisere funksjonen for automatisk identifisering.
Bruksområde
Bruken av maskinvision omfatter hovedsakelig to aspekter: testing og robotvisjon:
1. Oppdaging: Den kan deles inn i høy-nøyaktig kvantitativ oppdaging (som celleklassifisering av mikrografier, måling av størrelse og posisjon på maskinKomponenter) og kvalitativ eller semi-kvantitativ oppdaging uten måleinstrumenter (som vareutseendesjekk, identifisering og posisjonering av komponenter på montasjelinje, feiloppdaging og fullstendighetsjekk av montering).
2. Robotseende: Brukes for å veilede robotens operasjon og handling over et stort område, som å plukke arbeidskomponenter fra en uordnet haug levert av en hoppersystem og plassere dem på en transportbånd eller annen utstyr i en bestemt retning (dvs. hoppersystemets plukkproblem). Når det gjelder operasjoner og handlinger på et lite område, trengs også taktisk sanseteknologi.