RO
RO
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

Viziune Mașină
viziunea mașinală este o tehnologie cuprinzătoare, care include prelucrarea imaginii, tehnologia ingineriei mecanice, controlul, iluminarea electrică a sursei de lumină, imagistica optică, senzorii, tehnologia video analogică și digitală, software-ul și tehnologia hardware-ului (algorit
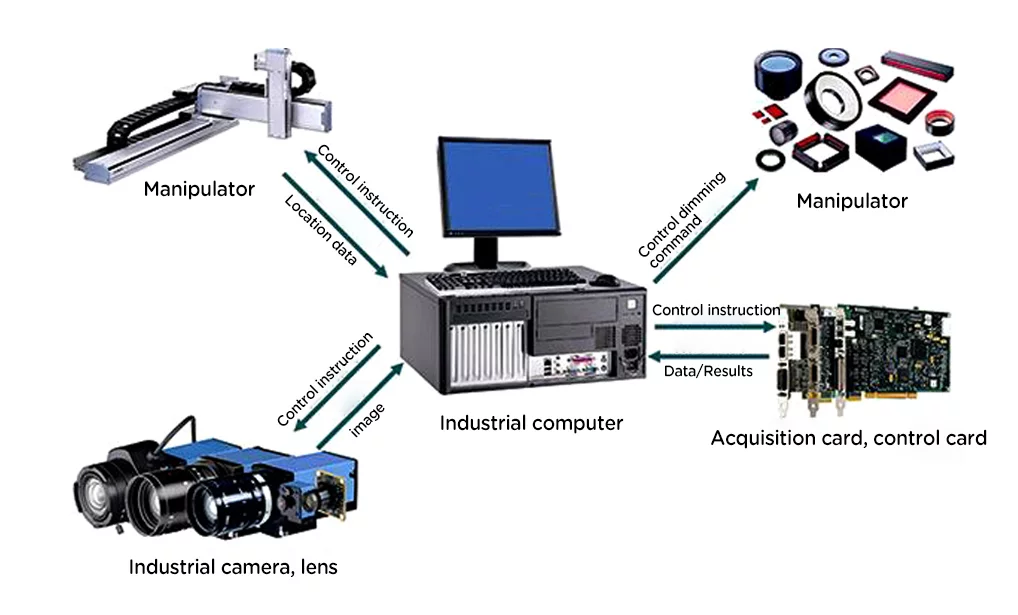
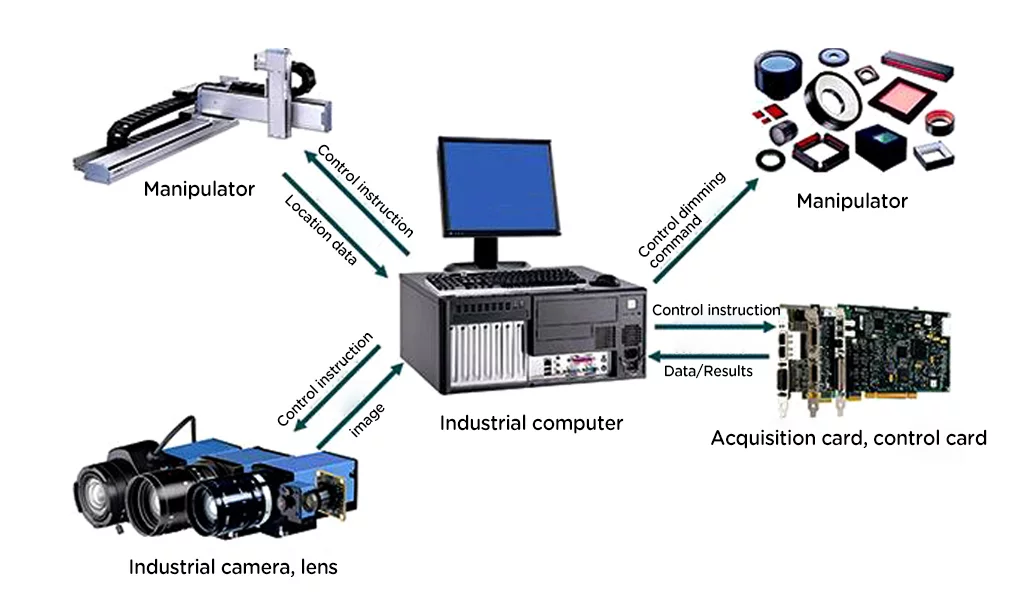
Principiul de funcționare
sistemul de inspecție a vederii artificiale utilizează o cameră ccd pentru a converti ținta detectată într-un semnal de imagine, care este trimis la un sistem dedicat de procesare a imaginii și convertit într-un semnal digital în funcție de distribuția pixelilor, luminozitatea, culoarea și alte
Domeniul de aplicare
aplicarea vederii artificiale include în principal două aspecte: detectarea și vederea robotică:
1. detecția: poate fi împărțită în detecție cantitativă de înaltă precizie (cum ar fi clasificarea celulelor micrografelor, măsurarea dimensiunii și poziției pieselor mecanice) și detecție calitativă sau semi-cantitativă fără instrumente de măsurare (cum ar fi inspecția
2. viziunea robotului: este utilizată pentru a ghida operaţiunile şi acţiunile robotului într-o gamă largă, cum ar fi recoltarea pieselor de lucru din grămada de piese de lucru trimise de trolier şi plasarea lor pe banda de transport sau alte echipamente într-o anumită orientare (adică problema