TL
TL
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

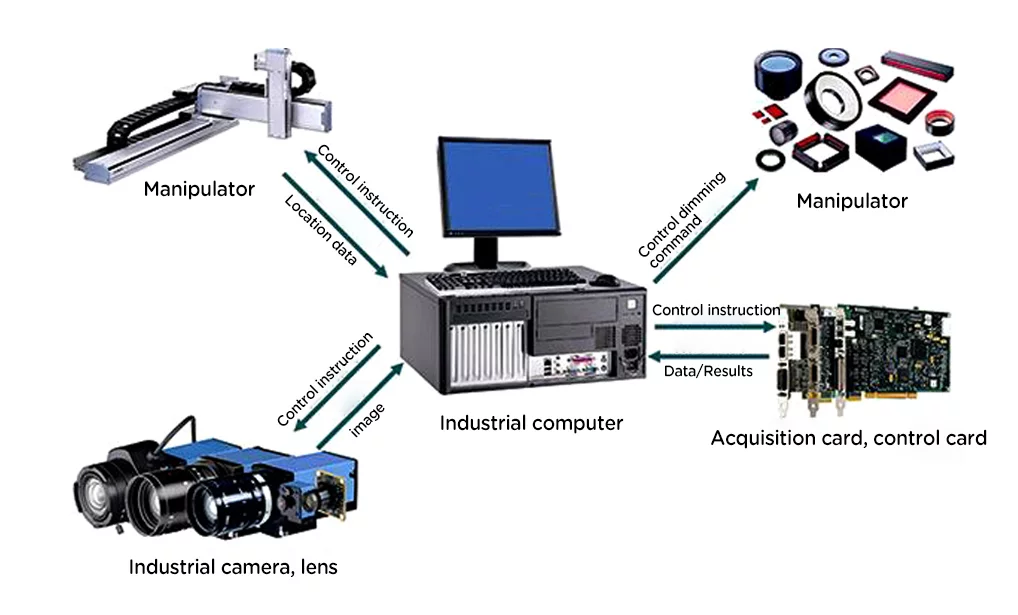
Machine Vision
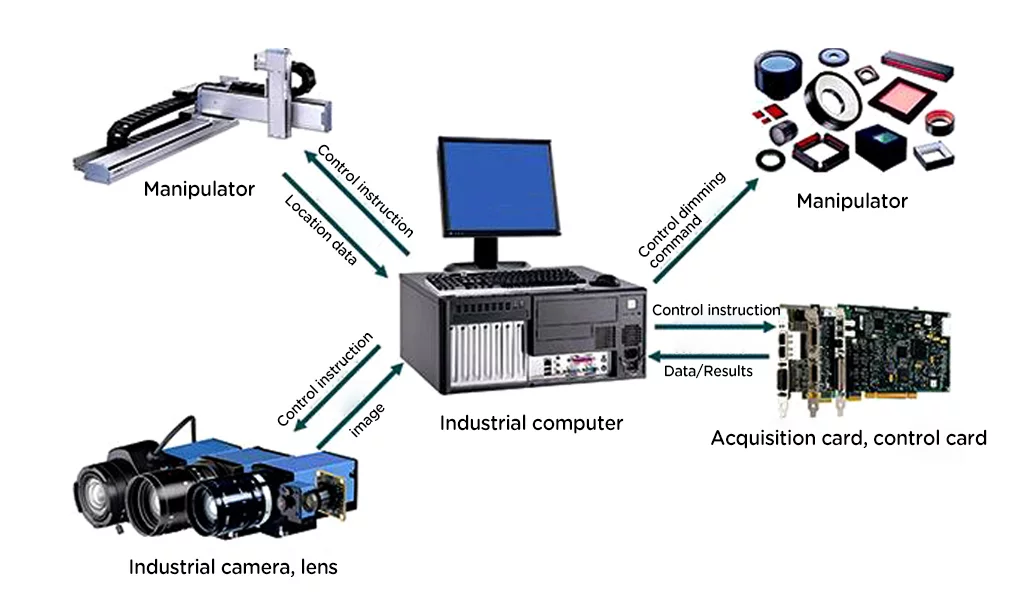
Ang machine vision ay isang komprehensibong teknolohiya, kabilang ang pagproseso ng imahe, teknolohiya ng inhinyeriyang mekanikal, kontrol, ilaw ng mapagkukunan ng ilaw ng kuryente, optical imaging, sensor, analog at digital video technology, software ng computer at teknolohiya ng hardware (mga algorithm ng pagpapahusay at pagsusuri ng imahe,
Prinsipyong Pamamaraan
ang sistema ng inspeksyon ng machine vision ay gumagamit ng isang ccd camera upang i-convert ang nakikitang target sa isang signal ng imahe, na ipinadala sa isang dedikadong sistema ng pagproseso ng imahe, at na-convert sa isang digital signal ayon sa pamamahagi ng pixel, liwanag, kulay at iba pang impormasyon, at ang sistema
Lugar ng aplikasyon
ang paggamit ng paningin ng makina ay higit na may dalawang aspeto: pagtuklas at paningin ng robot:
1. pagtuklas: ito ay maaaring nahahati sa mataas na katumpakan ng dami ng pagtuklas (tulad ng pag-uuri ng mga selula ng mga micrograph, sukat at pagtuklas ng posisyon ng mga bahagi ng mekanikal) at kalidad o semi-kuntitibong pagtuklas nang walang mga instrumento sa pagsukat (tulad ng
2. robot vision: ginagamit ito upang gabayan ang operasyon at pagkilos ng robot sa isang malaking hanay, tulad ng pag-aalis ng mga piraso ng trabaho mula sa masamang punong piraso ng mga piraso ng trabaho na ipinadala ng hopper at inilagay ang mga ito sa conveyor belt o iba pang kagamitan sa isang tiyak na orientasyon (