HI
HI
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

मशीन विज़न
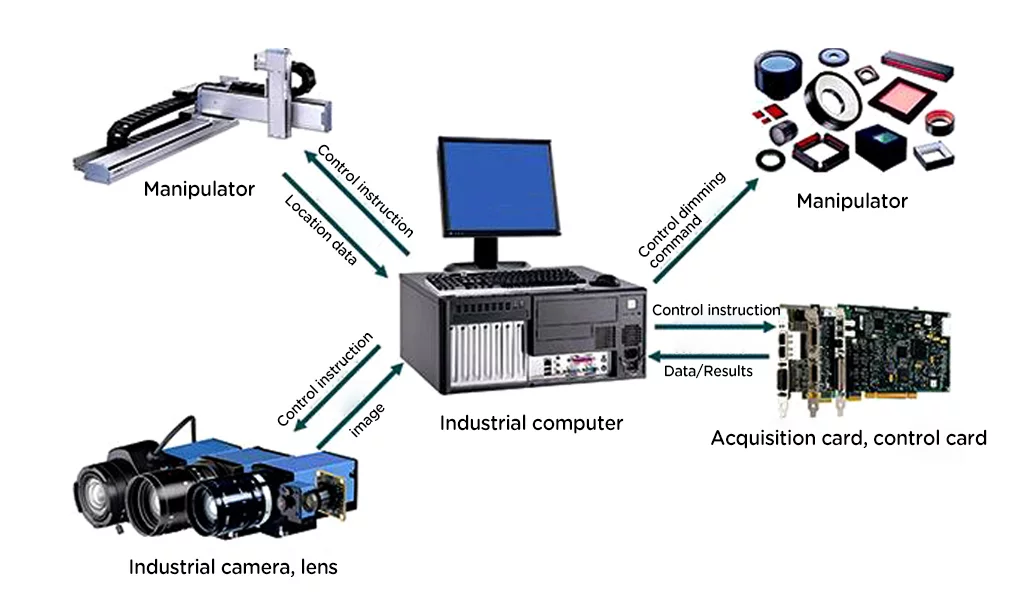
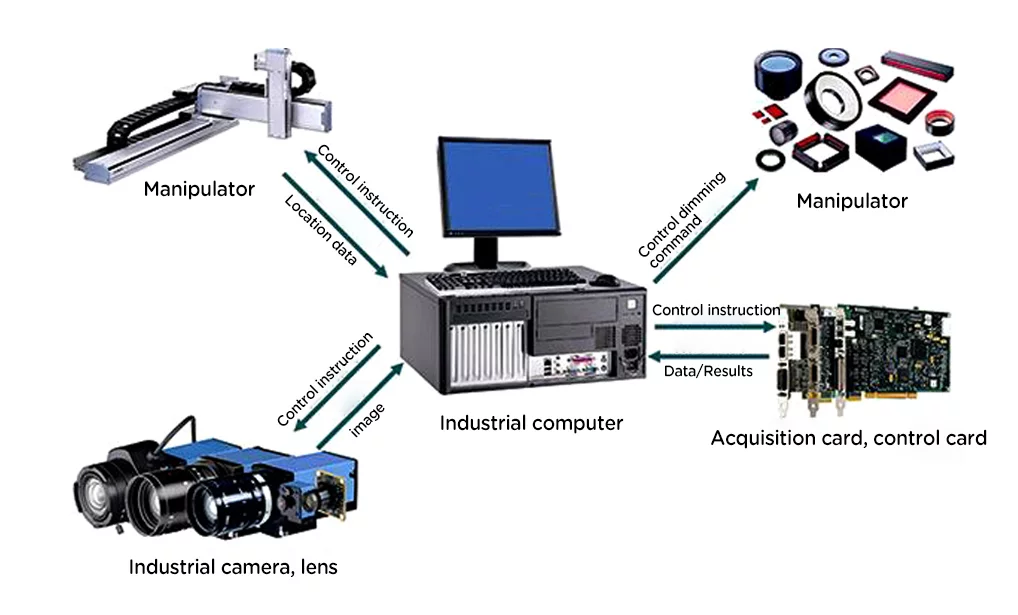
मशीन विज़न एक व्यापक प्रौद्योगिकी है, जिसमें छवि प्रसंस्करण, यांत्रिक इंजीनियरिंग प्रौद्योगिकी, नियंत्रण, बिजली के स्रोत प्रकाश प्रदान, ऑप्टिकल इमेजिंग, सेंसर, एनालॉग और डिजिटल वीडियो प्रौद्योगिकी, कंप्यूटर सॉफ्टवेयर और हार्डवेयर प्रौद्योगिकी (छवि वृद्धि और विश्लेषण एल्गोरिदम, छवि कार्ड, I/O कार्ड, आदि) शामिल है। एक सामान्य मशीन विज़न अनुप्रयोग प्रणाली में छवि कैप्चर, प्रकाश स्रोत प्रणाली, छवि डिजिटाइज़ेशन मॉड्यूल, डिजिटल छवि प्रसंस्करण मॉड्यूल, बुद्धिमान निर्णय-निर्धारण मॉड्यूल और यांत्रिक नियंत्रण एक्शन मॉड्यूल शामिल है।
कार्य करने का सिद्धांत
मशीन विज़न जाँच प्रणाली एक CCD कैमरे का उपयोग करती है जो पता चलने वाले लक्ष्य को एक छवि संकेत में बदलती है, जो एक विशेष छवि प्रसंस्करण प्रणाली तक भेजा जाता है, और इसे पिक्सेल वितरण, चमक, रंग और अन्य जानकारी के अनुसार एक डिजिटल संकेत में बदल दिया जाता है, और छवि प्रसंस्करण प्रणाली इन संकेतों पर विभिन्न गणनाएँ करती है। लक्ष्य के गुणों को निकालने के लिए, जैसे क्षेत्रफल, मात्रा, स्थिति, लंबाई, और फिर पूर्वनिर्धारित सहिष्णुता और अन्य शर्तों, जिसमें आकार, कोण, संख्या, पास/फेल, मौजूदगी/अनुपस्थिति आदि, के अनुसार परिणाम देने के लिए, स्वचालित पहचान कार्य को सक्षम करने के लिए।
आवेदन क्षेत्र
मशीन विज़न का अनुप्रयोग मुख्य रूप से दो पहलुओं पर केंद्रित है: जाँच और रोबोट विज़न:
1. पहचान: इसे उच्च-शुद्धता की मात्रात्मक पहचान (जैसे माइक्रोग्राफ के सेल का वर्गीकरण, यांत्रिक खंडों का आकार और स्थिति का मापन) और मापन उपकरणों के बिना गुणात्मक या आधारित अर्ध-मात्रात्मक पहचान (जैसे उत्पाद की बाहरी जाँच, सभी घटकों की पहचान और स्थिति, दोष पहचान और सम्पूर्णता की पहचान) में विभाजित किया जा सकता है।
2. रोबोट दृष्टि: यह रोबोट की क्रियाओं और कार्यों को मार्गदर्शित करने के लिए बड़े पैमाने पर उपयोग की जाती है, जैसे हॉपर द्वारा भेजे गए अव्यवस्थित कार्यपट्टियों से कार्यपट्टियों को उठाना और उन्हें निश्चित दिशा में कनवेयर बेल्ट या अन्य उपकरणों पर रखना (अर्थात, हॉपर चयन की समस्या)। छोटे क्षेत्र में कार्य और क्रियाएं करने के लिए, स्पर्शज अनुभव प्रौद्योगिकी की आवश्यकता होती है।